- Система видеонаблюдения
- Системы автоматизации конвейерного транспорта
- Системы автоматизации, сигнализации и связи шахтных подъемных установок
- Системы голосовой связи
- Системы контроля и прогноза газодинамических явлений (ГДЯ)
- Системы контроля параметров шахтной/рудничной атмосферы
- Системы оповещения и определения местоположения персонала и транспорта
- Системы передачи информации
СПГТ-41 (Система позиционирования горнорабочих и транспорта)
")
Общая информация
Назначение – выполнения требований п. 22 ФНП "Правила безопасности в угольных шахтах" в части обеспечения наблюдения за положением персонала (позиционирование в реальном времени с разрешением ±20 м), находящегося в шахте, и предоставления информации о его местоположении шахтным и аварийно-спасательным службам.
Система используется для поиска горнорабочих и транспорта в нормальных условиях эксплуатации. В аварийных условиях и при проведении спасательных работ Система используется для определения последнего зафиксированного местоположения горнорабочих, эти данные используются системой поиска в аварийных ситуациях СПАС «Микон».
Система может использоваться:
- как резервный канал аварийного оповещения, применяемый совместно с комплексом СУБР-1П и другими системами аварийного оповещения;
- для контроля нахождения горнорабочих на рабочих местах в соответствии с их нарядами, для создания защищаемых зон, появление персонала в которых должно сопровождаться противоаварийными или другими действиями;
- для ведения табельного учета персонала путем фиксации времени выдачи/сдачи персональных радиоблоков;
- для получения исходной информации при ведении расчетов производительности внутришахтного транспорта;
- при решении задач обнаружения людей впереди движущегося транспорта в подземных выработках.
Система может интегрироваться с системами типа «Микон III», другими автоматизированными системами оперативно-диспетчерского управления (АСОДУ) и системами табельного учета. Для передачи данных система может быть подключена к системе передачи информации СПИН или другим универсальным системам связи.
Область применения – подземные выработки шахт, рудников и их наземные строения, в том числе опасные по газу и (или) пыли, согласно маркировке взрывозащиты и требованиям отраслевых Правил безопасности.
Программные и технические средства Системы обеспечивают:
- разделение подземного пространства на непрерывную систему зон (участков), в которых контролируется наличие персонала (транспортных средств, подвижного оборудования) или местоположение персонала с точностью 5-10м;
- формирование защищаемых зон, при наличии персонала в которых формируются предупреждающие сигналы, противоаварийные действия и пр.;
- предоставление информации о последнем зафиксированном местоположении горнорабочих при проведении поисковых и спасательных операциях;
- локальное автоматическое управление и телеуправление выходным реле считывателей для воздействия на устройства сигнализации и блокирования работы машин и механизмов (при получении сигнала аварийного оповещения, нахождении носителей меток в защищаемых, запретных зонах и т.п.), в том числе, контроль появления персонала перед движущимся транспортным средством (подвижным оборудованием);
- бесконтактное считывание номеров меток (встроенных в радиоблок горнорабочего, закрепленных за транспортным средством, подвижным оборудованием) с разрешением коллизий при их регистрации;
- передачу на центральную ЭВМ наземного вычислительного комплекса (далее сервер) данных о зарегистрированных метках и направлении их движения, в том числе через СПИН и системы связи других производителей в едином масштабе времени;
- передачу на сервер (в систему аэрогазового контроля, многофункциональную систему безопасности шахты) данных о контролируемых параметрах шахтной атмосферы и состоянии горнорабочего (в зависимости от типа используемого головного светильника);
- передачу на сервер формируемых горнорабочим кодовых сообщений со считывателей;
- обработку данных, полученных от считывателей для определения текущего положения носителей меток и ведение базы данных с текущими данными и предысторией положения носителей меток;
- архивирование информации о местоположении и перемещении носителей меток в каждый момент времени;
- предоставление стандартного высокоуровневого доступа к базе данных с помощью индивидуальных автоматизированных рабочих мест;
- формирование отчетов задаваемого содержания и формы о нахождении персонала на рабочем месте, маршрутах движения и т.д.;
- передачу на персональные радиоблоки сигнала аварийного оповещения при нахождении носителей меток в зоне действия считывателей (формирование резервного канала аварийного оповещения);
- определение маршрута передвижения транспортных средств (подвижного оборудования), в том числе в зонах, в которых прокладка проводных линий связи невозможна или нецелесообразна;
- работу считывателей и системы передачи данных от считывателей на сервер в аварийных ситуациях при отсутствии сетевого питания переменного тока;
- автономную работу считывателей при отсутствии линии связи с запоминанием прохождения персональных радиоблоков с возможностью передачи этих данных на сервер при восстановлении связи;
- регистрацию аварийных событий и нарушений в работе СПГТ;
- синхронизацию внутреннего времени сервера и считывателей;
- резервирование каналов связи и линий питания;
- предоставление стандартных интерфейсов связи с системами табельного учета;
- фиксацию времени выдачи/сдачи радиоблоков и заполнение базы данных для ведения табельного учета;
- формирование автоматизированных рабочих мест (АРМ) Ламповщика, АРМ Диспетчера и АРМ Инженера КИПиА: на АРМ Ламповщика: отображение номера радиоблока, номера метки и идентификацию носителя (горнорабочего) метки, контроль работоспособности радиоблока и перепрограммирование радиоблока; на АРМ Диспетчера: отображения информации о текущем положении носителей меток на мнемосхеме, в таблицах; поиск горнорабочего в зонах, в которых контролируется наличие меток; формирование отчетов о перемещениях носителей меток, списка меток в зоне и т.д.; на АРМ Инженера КИПиА: контроль работоспособности радиоблока; настройки, конфигурирование и перепрограммирование радиоблока.
| Наименование параметра | Значение |
| Типы устройств: | |
| устройства с функциями позиционирования: | |
| радиоблоки с меткой системы позиционирования | СУБР-02СМ, СГМ «Исеть» |
| светильники | светильники: СВГ «ЛУЧ 2», СГГ-9С, СВГ «СИГМЕТ», СМС-7Р |
| автономная точка отметки | АТО |
| считыватели | УРПТ-485.Y.ZZ-W |
| повторители | ПБИ-485.01.ZZ-VV.WW |
| барьеры искробезопасности | ПБИ-485.02.ZZ-VV.WW |
| мобильное устройство регистрации | МУР ШИП |
| источники питания: | |
| искробезопасные | ZVB |
| рудничного исполнения | ИБП-24С |
| трансформаторные блоки | БТ-1, БТ-3, БТ-6 |
| Количество элементов, обеспечивающих позиционирование, шт., не более: | |
| количество меток | 4095 |
| количество считывателей на одной магистрали связи | 247 |
| количество магистралей связи | 256 |
| количество автономных точек отметки | 65 536 |
| количество мобильных устройств регистрации | 65 536 |
| количество АРМ Системы | ограничено возможностями локальной сети |
| Сервер: | |
| тип СУБД | FireBird SQL |
| язык запросов | SQL |
| Характеристики системы передачи данных | |
| Параметры высокочастотного канала связи: | |
| тип связи | двухсторонняя радиосвязь |
| режим связи | полудуплекс |
| скорость передачи данных, кБод, не менее | 1024 |
| гарантированная / максимальная дальность считывания меток (в прямой видимости), м | 25 / 100 |
| диапазон частот, МГц | 2400…2484 |
| периодичность опроса считывателем, с, не более: | |
| в синхронном режиме опроса | 4,5 |
| в асинхронном режиме опроса | 0,4 |
| максимальная скорость перемещения метки, м/с | 12 |
| Параметры канала связи «считыватель – сервер»: | |
| Параметры канала связи «считыватель – сервер»: | |
| тип связи | двухсторонняя проводная |
| режим связи | полудуплекс |
| интерфейс | RS-485 |
| протокол | Modbus RTU |
| скорость передачи данных, кБод | 9,6 |
| Параметры канала связи «сервер – АРМ и другие пользователи»: | |
| тип локальной вычислительной сети | Ethernet 10/100 TX |
| количество пользователей | ограничено возможностями локальной сети |
| Время обновления информации о местоположении меток на планах горных выработок АРМ Диспетчера, с | 5 (задается программно) |
| Характеристики структуры системы связи RS-485 | |
| Параметры системы связи: | |
| максимальное количество магистралей связи | 256 |
| максимальное количество считывателей на магистрали: | |
| без повторителей (на одном сегменте), шт. | 14 |
| не более - с повторителями, шт. | 247 |
| не более - максимальная длина сегмента магистрали связи, м | 1200…3500 |
| среда передачи | витая пара |
| Возможность резервирования: | |
| канала передачи данных | да |
| по линии питания | да |
| Характеристики системы электропитания | |
| Напряжение питания переменного тока (50 Гц), В | 36 / 127 / 380 / 660 |
| Напряжение питания технических средств: | |
| системы СПГТ-41-I, В | 12±1,5 |
| системы СПГТ-41-II, В | 12...24 |
| Аккумуляторная поддержка питания технических средств | да |
| Время работы от аккумуляторов, час, не менее | 10 |
Система имеет 4-уровневую структуру (рисунок):
1-й уровень (полевой): метки Системы (радиоблоки, встраиваемые в светильники горнорабочих, устанавливаемые на транспортные средства, подвижное оборудование), автономные точки отметки (АТО);
2-й уровень (контроллерный): считыватели и повторители, устанавливаемые в подземных выработках, на входе в шахту (рудник), мобильные устройства регистрации (МУР), источники питания с аккумуляторной поддержкой;
3-й уровень (связи): средства и системы передачи информации, сервер и конвертеры интерфейсов;
4-й уровень (диспетчерский): АРМ Диспетчера, АРМ Ламповщика, АРМ Инженера КИПиА, системы табельного учета, удаленные пользователи.
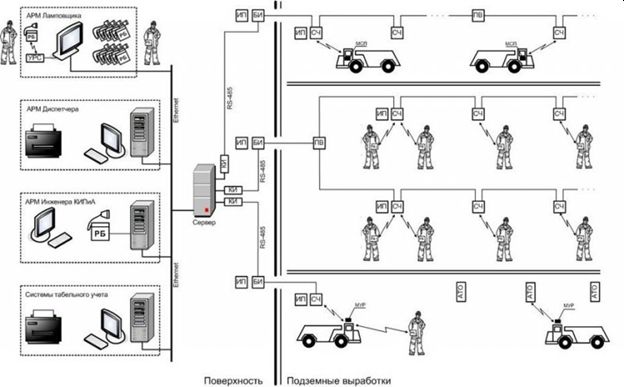
Рисунок 1 – Структура Системы СПГТ-41:КИ – конвертеры интерфейсов; БИ – барьеры искробезопасности; ИП – Источники питания с аккумуляторной поддержкой; СЧ – считыватели; ПВ – повторители; АТО – автономная точка отметки; МУР – мобильное устройство регистрации; РБ – радиоблоки со встроенной меткой системы позиционирования; МСП – метка системы позиционирования, устанавливаемая на ВШТ
Позиционирование горнорабочих
По месту расположения технических средств система позиционирования делится на наземную и подземную части.
Наземная часть СИСТЕМЫ представляет собой совокупность устройств, предназначенных для передачи, отображения и хранения информации, полученной от считывателей подземной части СИСТЕМЫ о положении меток точного позиционирования (находящихся у горнорабочих и/или установленных на внутришахтном транспорте) и направлении их движения; формирования отчетов задаваемого содержания и формы о времени нахождения на рабочем месте, маршрутах движения.
Для обмена информацией между сервером, АРМ горного диспетчера и АРМ ламповщика используется связь Ethernet TX/FX.
Подземная часть СИСТЕМЫ представляет собой совокупность устройств регистрации персонала и транспорта (далее считыватель, УРПТ, анкер), предназначенных для регистрации находящихся в зоне видимости меток системы позиционирования (находящихся у горнорабочих и/или установленных на внутришахтном транспорте) и передачи зарегистрированных номеров меток, времени их регистрации и иных данных, по запросу, на сервер сбора данных. УРПТ с функцией повторителя дополнительно обеспечивают возможность удлинения линии связи стандарта TIA/EIA-485.
Для обеспечения требования точного позиционирования считыватели устанавливаются непрерывно вдоль выработок с шагом расстановки, определяемой качеством связи УРПТ и метками позиционирования (200 – 400 м).
Для задач точного (непрерывного) позиционирования используется метод измерения расстояния по времени распространения радиосигнала, реализованный с помощью приемопередатчика nanoLOC, с использованием кодирования CSS. Приемники, применяя согласованный фильтр на входе, преобразуют ЛЧМ-импульсы в очень узкие по времени SYNC-импульсы и определяют время поступления входного сигнала с наносекундной точностью, что позволяет в условиях горных выработок измерять расстояния с точностью 5-10 м.
Метка точного позиционирования персонала (далее МТП) для оперативного, непрерывного и точного определения местоположения шахтера в горных выработках встроена в фару светильника головного малогабаритного СГМ «ИСЕТЬ».
В батарейный отсек головного светильника СГМ «ИСЕТЬ» встраивается радиоблок СУБР-02СМ для работы с комплексом СУБР-1П, а также локационный передатчик PGLR (либо генератор поискового сигнала ГПС-1) системы поиска, активируемый персональной меткой МТП, в случае отсутствия связи со считывателями системы позиционирования.
Метка позиционирования внутришахтного транспорта (далее АТО) устанавливается на корпус контролируемых единиц техники.
Считыватели посылают запросы на установление связи с метками в зоне своего действия. По командам сервера считыватели передают ему информацию о зарегистрированных метках (МТП и АТО), направлении их движения, другие данные, сигналы аварийного оповещения.
Принятый сигнал аварийного оповещения вызывает мигание всех ламп головных светильников, либо определенного светильника в случае индивидуального вызова.
Для подтверждения получения сигнала аварийного оповещения и осуществления обратной связи с диспетчером, необходимо зажать кнопку управления, расположенную на фаре, до получения 3-х кратного светового сигнала о квитировании вызова (сигнала аварии).
Полевой уровень системы передачи данных осуществляется по интерфейсу TIA/EIA-485 (от считывателей до ближайшего коммутатора).
Магистральный уровень системы передачи данных реализуется на основе технологии Ethernet 1000BASE-X, Ethernet 100FX, xDSL и обеспечивает передачу данных между верхним уровнем и подземным оборудованием СИСТЕМЫ.
Программное обеспечение.
На сервере системы позиционирования функционирует программное обеспечение ПТК «Горный диспетчер» (далее ПТК ГД).
На сервере хранятся следующие данные: база данных с данными позиционирования; настройки сервера; дневники работы ПО.
ПТК ГД управляет обменом данными со считывателями, организуя их периодический опрос, и заполняет базу данных, в которую заносятся время, номер считывателя, номер метки и табельный номер горнорабочего и/или идентификатор транспорта. ПО обрабатывает данные о положении и направлении движения меток. База данных ПТК ГД может быть реализована в среде Microsoft SQL Server либо PostgreSQL, по выбору Заказчика.
Также в состав ПТК ГД входят следующие программы:
- АРМ горного диспетчера – ПО используется на рабочем месте диспетчера. ПО обеспечивает отображение информации о текущем местоположении горнорабочих и транспорта на планах горных выработок, просмотр маршрута передвижения, предоставление отчета о времени пребывания людей в шахте, отображение информации о текущем состоянии и отказах системы позиционирования;
- АРМ ламповщика – ПО используется на АРМ ламповой. Предназначено для регистрации выдачи/приема светильников, редактирование табеля;
- АРМ-Редактор – ПО предназначенное для настройки и обслуживания системы. В зависимости от прав доступа (Администратор, старший ламповщик) ПО позволяет редактировать справочники системы, отвечающие за настройки оборудования, мнемосхемы, а также данные персонала и табельного учета.
На локальных компьютерах, на которых запущены АРМ, хранятся следующие данные: конфигурации системы позиционирования; мнемосхемы; звуковые файлы и файлы с изображениями, которые используются при отображении информации; шаблоны отчетов; файлы с данными; документация по текущей конфигурации системы позиционирования; дневники работы ПО и т.д.
Основными источниками информации в системе позиционирования являются УРПТ, с помощью которых происходит непрерывная регистрация меток в горных выработках. Также источником информации являются устройства регистрации светильников УРС, устанавливаемые в ламповой.
Основным пользователем информации является горный диспетчер, осуществляющий оперативное управление и контроль за нахождением персонала в шахте.
ПТК ГД предоставляет возможность получения данных за заданный промежуток путем стандартного обращения к серверу, который обеспечивает долговременное хранение данных. ПО обеспечивает расчет и формирование следующих отчетных форм:
- отчет о выданных светильниках;
- отчет о времени пребывания людей в шахте;
- индивидуальный отчет о пребывании в шахте;
- табель учета рабочего времени;
- другие.
Визуализация позиционирования персонала и транспорта, а также ведения горных работ, выполнена в трехмерной информационной модели шахты, имеющей следующие основные свойства:
- модель построена по реальным координатам осей выработок;
- в модели выполнена производственно-пространственная структура, показаны вертикальные, наклонные и горизонтальные выработки;
- цветом могут выделяться участки ведения работ, зоны позиционирования (зональное позиционирование) и т.д.;
- на производственно-пространственную модель слоями накладываются объекты – слой считывателей точного позиционирования, слой считывателей зонального позиционирования и т.п.;
- на информационной модели шахты отражается передвижение персонала (оснащенного метками точного и/или зонального позиционирования) и транспорта в реальном масштабе и времени с дискретностью не более 5 секунд и точностью 5-10 м;
- группа близко находящихся сотрудников отображается одним значком с цифрой, отражающей количество человек в группе;
- модель работает в интерактивном режиме, позволяющем диспетчеру передать сигнал аварийного оповещения и визуально определить сотрудников, не получивших данный сигнал, а также осуществить вызов указанных сотрудников;
- атрибуты объекта позиционирования отражаются в специальной информационной карточке;
- объекты слоя могут иметь атрибуты, значения показателей, могут быть динамизированы;
- любая выработка, слой, зона либо объект могут быть отключены или включены в визуализацию;
- модель легко масштабируется и разносится частями на разные экранные панели диспетчера.
Позиционирование внутришахтного транспорта
Позиционирование ВШТ осуществляется путем фиксации сигнала метки, связанной с транспортным средством (подвижным оборудованием), на стационарных считывателях УРПТ и выполняется аналогично позиционированию горнорабочих. В качестве метки могут быть использованы следующие технические средства:
а) радиоблок водителя (оператора) транспортного средства (подвижного оборудования). В этом случае в начале каждой смены (например, при выдаче наряда) номер метки радиоблока водителя (оператора) транспортного средства (подвижного оборудования) вручную или программно связывается с конкретным транспортным средством (подвижным оборудованием). Определение местоположения ВШТ осуществляется по местоположению водителя (оператора).
б) индивидуальная метка. На транспортное средство (подвижное оборудование) устанавливается индивидуальная метка с уникальным номером, программно связанным с данным транспортным средством (подвижным оборудованием). Питание индивидуальной метки предусматривается от электросистемы транспортного средства (подвижного оборудования). Определение местоположения ВШТ осуществляется путем фиксации индивидуальной метки на стационарных считывателях УРПТ.
Определение маршрута передвижения внутришахтного транспорта
Определение маршрута передвижения ВШТ реализуется следующими способами:
путем последовательной фиксации метки, связанной с транспортным средством (подвижным оборудованием), на разных считывателях УРПТ;
применением автономных точек отметки.
Определение маршрута передвижения ВШТ путем последовательной фиксации метки на разных считывателях выполняется аналогично определению маршрута движения горнорабочих и реализуется программным обеспечением сервера и АРМ Диспетчера. При этом количество считывателей, устанавливаемых по маршруту движения ВШТ, зависит от необходимой точности построения маршрута. При отключении питания метки (например, при поломке транспортного средства) местоположение ВШТ определяется по последним данным о его регистрации.
Определение маршрута передвижения ВШТ посредством регистрации на автономных точках отметки осуществляется с помощью следующих программных и технических средств системы СПГТ-41:
автономные точки отметки АТО;
мобильное устройство регистрации МУР;
считыватель с функцией транспортного учета УРПТ-485.3.ZZ-W;
источник питания с аккумуляторной поддержкой (ШИП, ZVB, ИБП);
сервер сбора данных с устройством бесперебойного питания;
конвертеры интерфейсов;
АРМ Диспетчера;
АРМ Инженера КИПиА;
программное обеспечение, позволяющее заносить в базу данных индивидуальные номера АТО и МУР.
Если расстояние между сервером и считывателем УРПТ-485.3.ZZ-W превышает 3,5 км необходимо использовать считыватели УРПТ-485.2.ZZ-W с функцией повторителя или повторители ПБИ-485.01.ZZ.
На рудниках и шахтах, опасных по газу (метану), пыли и внезапным выбросам, необходимым условием является установка барьеров искробезопасности ПБИ-485.02.ZZ, обеспечивающих гальваническое разделение и искробезопасность линий передачи данных между конверторами интерфейсов и считывателями УРПТ-485.3.ZZ-W, находящимися в подземных выработках.
Определение маршрута передвижения ВШТ посредством регистрации на автономных точках отметки выполняется в случаях, когда установка стационарных считывателей УРПТ невозможна или нецелесообразна по причине возможного разрушения устройств или линии связи (например, в зоне ведения взрывных работ).
АТО устанавливаются в зонах, где необходимо контролировать появление ВШТ. АТО закладываются в скважину (шпур), пробуренную в борту выработки, и ориентируются таким образом, чтобы поляризация антенны АТО совпадала с поляризацией антенны мобильного устройства регистрации, установленного на ВШТ. АТО имеет автономное питание.
В конечной точке маршрута транспортного средства (например, в зоне разгрузки) устанавливается стационарный считыватель УРПТ-485.3.ZZ-W, связанный с сервером Системы проводными линиями связи. Антенна считывателя направляется в сторону остановки транспортного средства. Питание стационарного считывателя производится от источника питания, входящего в состав Системы.
На контролируемое транспортное средство устанавливается мобильное устройство регистрации. Питание =12/24В мобильного устройства регистрации предусматривается от электросистемы транспортного средства. МУР является ведомым устройством и обеспечивает передачу данных от АТО на стационарный считыватель.
Пример расстановки технических средств приведен на рисунке 2.
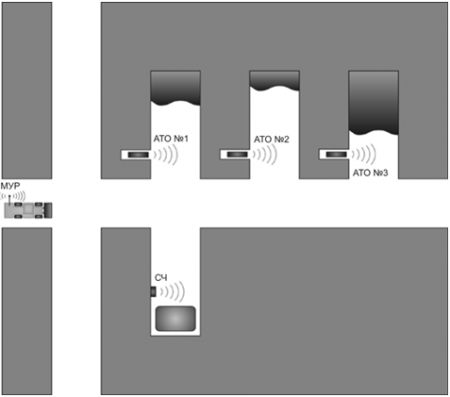
Рисунок 2 – Пример расстановки технических средств:
АТО – автономная точка отметки; СЧ – стационарный считыватель УРПТ-485.3.ZZ-W; МУР – мобильное устройство регистрации
Определение маршрута передвижения ВШТ посредством регистрации на автономных точках отметки осуществляется следующим образом:
После подачи питания на МУР (начала работы ВШТ) производится его синхронизация с сервером Системы. Синхронизация осуществляется при попадании МУР в зону приема стационарного считывателя.
Периодичность излучения сигнала АТО составляет не менее 10 раз/с. При появлении ВШТ в контролируемой зоне мобильное устройство регистрации, установленное на ВШТ, принимает сигнал от АТО (ее уникальный номер и уровень заряда элемента питания) и фиксирует время регистрации. На пути следования ВШТ может располагаться до 700 автономных точек отметки.
По прибытии ВШТ на конечную точку маршрута (например, в зону разгрузки) мобильное устройство регистрации попадает в зону приема стационарного считывателя. Стационарный считыватель организует канал передачи данных от МУР и считывает уникальные номера всех АТО, через которые проходил ВШТ, и время регистрации ВШТ на этих АТО. Далее, по командам сервера считыватель передает полученную информацию на сервер.
Программное обеспечение (ПО), функционирующее на сервере, обрабатывает информацию, полученную от АТО, определяя зоны (участки) горных выработок, в которых фиксировался ВШТ, и предоставляет данные для отображения маршрута передвижения ВШТ на АРМ Диспетчера, для подсчета количества рейсов ВШТ и т.п.
Пример экрана АРМ Диспетчера приведен на рисунке 3.
Проверка работоспособности автономных точек отметки АТО и мобильных устройств регистрации МУР осуществляется на АРМ Инженера КИПиА.
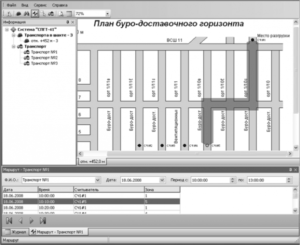
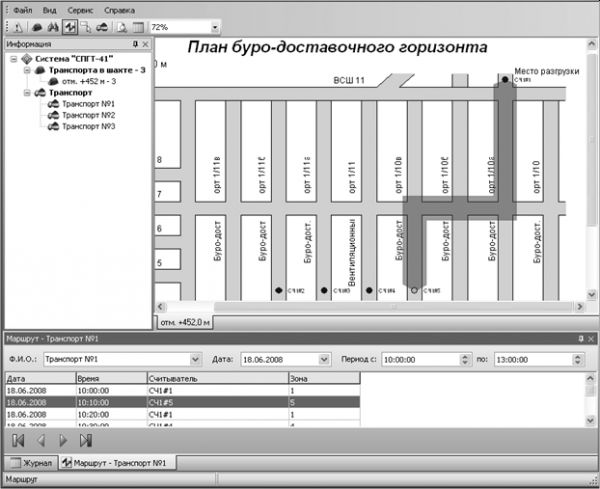
Рисунок 3 – Пример экрана АРМ Диспетчера
Обнаружение персонала перед движущимся транспортом
Решение задачи обнаружения персонала перед движущимся транспортом достигается применением следующих технических средств системы СПГТ-41:
- персональные радиоблоки с меткой системы позиционирования, встраиваемые в светильники горнорабочих;
- мобильные устройства регистрации, устанавливаемые на ВШТ.
Мобильное устройство регистрации устанавливается на ВШТ и во время движения ВШТ посылает запросы на установление связи с метками системы позиционирования в зоне своего приема. Гарантированная дальность приема сигнала антенной МУР составляет 25 м, максимальная дальность в прямой видимости – до 100 м. При появлении в зоне считывания меток МУР устанавливает с ними связь и получает их уникальные номера. Информация о наличии зарегистрированных меток по ходу движения ВШТ обрабатывается программными средствами МУР и сообщается водителю ВШТ посредством звуковой и световой сигнализации.
Метка системы позиционирования, встроенная в радиоблок водителя (оператора) ВШТ, а также метка, связанная с транспортным средством, в начале смены заносятся в память МУР и в процессе опроса данным мобильным устройством регистрации игнорируются.
Обнаружение персонала на движущейся конвейерной ленте
Обнаружение персонала на движущейся конвейерной ленте осуществляется с помощью следующих программных и технических средств системы СПГТ-41:
- персональные радиоблоки с меткой системы позиционирования, встраиваемые в светильники горнорабочих;
- считыватели УРПТ-485.4.ZZ-W;
- источники питания с аккумуляторной поддержкой (ШИП, ZVB, ИБП), без аккумуляторной поддержки (СПИН 00000-ИП01.21.3);
- сервер сбора данных с устройством бесперебойного питания;
- конвертеры интерфейсов;
- АРМ Диспетчера;
- АРМ Инженера КИПиА;
- АРМ Табельщика.
Для подключения удаленных считывателей дополнительно применяются считыватели УРПТ-485.2.ZZ-W с функцией повторителя или повторители ПБИ-485.01.ZZ.
На рудниках и шахтах, опасных по газу (метану), пыли и внезапным выбросам, необходимым условием является установка барьеров искробезопасности ПБИ-485.02.ZZ, обеспечивающих гальваническое разделение и искробезопасность линий передачи данных между конверторами интерфейсов и устройствами, находящимися в подземных выработках.
Работа охранного конвейерного считывателя УРПТ-485.4.ZZ-W основана на определении скорости и направления перемещения радиометки, установленной в светильник.
Считыватель УРПТ-485.4.ZZ-W устанавливается возле конвейера, антенны считывателя размещаются вблизи или над конвейерной лентой на расстоянии 28-32 метра друг от друга. Антенны ориентируются в противоположных направлениях, так чтобы зоны приёма располагались вне пространства между антеннами.
При проезде абонента на конвейере первая антенна (входная зона) фиксирует появление метки в своей зоне и запускает таймер. При появлении абонента на второй антенне (в выходной зоне) считыватель проверяет значение времени, прошедшего с момента самой последней регистрации данного абонента на первой антенне. Если это время меньше заданного, то вырабатывается сигнал аварийной остановки конвейера - переключается внутреннее реле, вызывая срабатывание механизма остановки. Время остановки и номер абонента, вызвавшего срабатывание, фиксируется во внутреннем журнале и по запросу передается серверу.
Необходимый интервал времени между регистрациями абонента на различных антеннах считывателя рассчитывается, исходя из скорости движения конвейерной ленты и расстояния между антеннами, и задается на этапе пусконаладочных работ.
Таким образом, считыватель реагирует только на горнорабочих, проезжающих на ленте. Если абонент в зонах приемопередающих антенн считывателя перемещается шагом, а также при направлении его движения, противоположном направлению движения ленты, аварийный сигнал не вырабатывается.
Также аварийный сигнал не вырабатывается, если во входной зоне был зафиксирован один абонент, а через короткое время в выходной зоне появился другой – считыватель отслеживает индивидуальные номера абонентов.
Передача сигнала аварийного оповещения
Передача дублирующего сигнала аварийного оповещения через СПГТ осуществляется автоматически и синхронно с передачей сигнала комплексом СУБР-1П по команде с пульта диспетчера или вручную с автоматизированного рабочего места диспетчера.
Передача дублирующего сигнала аварийного оповещения осуществляется с места установки УРПТ на радиоблоки, находящиеся в зоне(ах) их действия.
Организация табельного учета
Организация табельного учета горнорабочих реализуется на основе данных о выдаче/сдаче радиоблоков со встроенными метками Системы. Основными средствами организации табельного учета являются радиоблоки горнорабочих, АРМ Ламповщика и АРМ Табельщика.
АРМ Ламповщика представляет собой комплекс технических и программных средств и в общем случае состоит из нескольких устройств регистрации светильников (УРС), информационной панели и соответствующего ПО. В базовом варианте в состав АРМ Ламповщика входит три устройства регистрации светильников (УРС): один – на регистрацию выдачи светильника, один – на регистрацию сдачи светильника и один – для реализации возможности выдачи светильника взамен неисправного. АРМ Ламповщика устанавливается около окна выдачи/сдачи светильников и подключается к локальной компьютерной сети Системы.
Регистрация факта выдачи светильника осуществляется следующим образом: горнорабочий непосредственно после получения светильника помещает его в зону считывания соответствующего устройства регистрации светильников. УРС считывает уникальный номер метки, встроенной в радиоблок выдаваемого светильника. При этом происходит проверка работоспособности метки. После этого ПО АРМ Ламповщика регистрирует факт выдачи светильника горнорабочему.
Регистрация факта сдачи светильника осуществляется следующим образом: горнорабочий непосредственно перед сдачей светильника помещает его в зону считывания соответствующего устройства регистрации светильников. УРС считывает уникальный номер метки, встроенной в радиоблок выдаваемого светильника. При этом происходит проверка работоспособности метки. После этого ПО АРМ Ламповщика регистрирует факт сдачи светильника.
Информация о зарегистрированных светильниках отражается на информационной панели АРМ Ламповщика. Появление записи о выдаче светильника на информационной панели означает, что светильник зарегистрирован в Системе и зафиксировано время начала смены горнорабочего. Удаление светильника из списка выданных (при его сдаче) означает окончание рабочей смены.
Вся информация о выданных светильниках хранится на сервере Системы.
Заполнение базы данных по сотрудникам предприятия (персональные данные, номера закрепленных светильников (радиоблоков) и пр.), настройка параметров ведения табельного учета осуществляется на АРМ Табельщика. Программное обеспечение (ПО) АРМ Табельщика позволяет автоматизировать составление табеля учета использования рабочего времени на основе данных, получаемых с сервера Системы.
Вся информация о сотрудниках предприятия хранится на сервере Системы.
Дополнительные возможности
Считыватели УРПТ-485.Y.ZZ-W имеют возможность подключения внешнего кнопочного пульта, с помощью которого можно передавать кодовое сообщение диспетчеру об опасных, аварийных ситуациях (пожар, задымление, затопление, несчастный случай и пр.), что позволяет значительно сократить общее время реагирования на нештатные ситуации. Внешние кнопочные посты могут быть реализованы с помощью ящиков монтажных ЯСУ.
УРПТ-485.Y.ZZ-W имеют два потенциальных дискретных входа, которые могут использоваться для подключения датчика наличия питающей сети источника питания для сигнализации о переходе источника питания на работу от аккумуляторных батарей. Дискретный вход может быть использован для телесигнализации и состоянии «сухого контакта».
На дискретный вход через «сухой контакт» может быть подано искробезопасное напряжение от источников питания, используемых в Системе.
УРПТ-485.Y.ZZ-W имеют релейный выход, который может использоваться для воздействия на искробезопасные цепи управления различных устройств и оборудования, при этом могут быть реализовано как телеуправления (от диспетчерской), так и локальное автоматическое управления (например, обнаружении радиометки в зоне действия УРПТ).
УРПТ-485.Y.ZZ-W и источники питания могут снабжаться датчиками на открытие крышки для своевременного оповещения диспетчера о несанкционированном доступе к техническим устройствам.
Мобильное устройство регистрации МУР имеет возможность осуществления сбора телеметрической информации на ВШТ и передачи ее на стационарные считыватели УРПТ.
Система обеспечивает возможность передачи информации от микропроцессорных устройств головного светильника в диспетчерскую. В зависимости от технических возможностей светильника Система обеспечивает передачу в систему аэрогазового контроля (многофункциональную систему безопасности) данных о контролируемых параметрах шахтной атмосферы (концентрации метана, оксида углерода, кислорода) и состоянии горнорабочего (транспортного средства, подвижного оборудования).